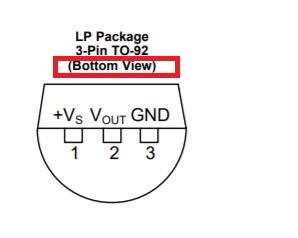
아두이노로 duty cycle, Low pass filter를 이용하여 1v,2v,3v,4v를 만들까 합니다.\
Low pass filter는 저역주파수 대역을 재생하고, 고역주파수 대역을 감소시킵니다. 즉, 고주파로 갈수록 신호를 DC가까이 만들 수 있으나, 단점은 저역대역을 크게 설정할 수록 DC에 가까워 지지만 전압을 컨버팅시킬때 빠르게 컨버팅하지 못 합니다.
<회로 Simulation>

v1은 초기전압(offset전압을 만들 수 있습니다.)
v2는 최대전압
TD는 타임딜레이 초기신호를 어느정도 지연시킬 것인가(Start대기 타이밍)
TR은 rising time엣지가 트리거까지 상승시간(신호가 high가 되는시간)
TF는 fall time트리거에서 엣지로 떨어지는시간 (신호가 Low가 되는시간)
PW는 펄스폭을 얼마나 줄 것인가
PER은 주기를 얼마로 줄 것인가
위와 같이 설정했다면 HIGH20us, LOW 80us = 주기 100us에 pulse가 나옵니다.
최대전압이 5V이면서 Duty20%입니다. 이걸 filter를 걸치면 100us주기 기준
20us(duty20%) = 1v
40us(duty40%) = 2v
60us(duty60%) = 3v
80us(duty80%) = 4v
100us(duty100%)= 5v
위 다섯 가지를 만들 수 있습니다.

노이즈처럼 신호가 좀 있는데 이건 filter를 더 크게 가져가면 더 줄일 수 는 있습니다.
초록색 1v짜리를 설명으로 하자면 20us에서 신호가 올라가 야하는데 LPF에 의해서 상승해야 하는 구간에 늘어지는 각이 커지기 때문입니다. 이건, 따로 Filter 공부를 하다 보시면 어느 주파수에 신호의 각을 구하는 법이 있습니다.
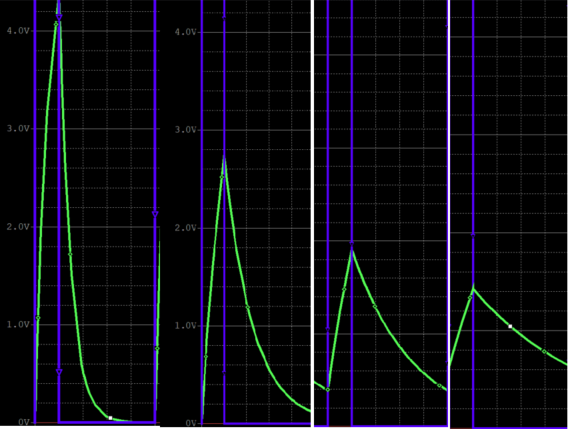
RC 값을 크게 키우면서 신호가 늘어지는 화면을 첨부하니 확인해 보시면 좋을 것 같습니다.
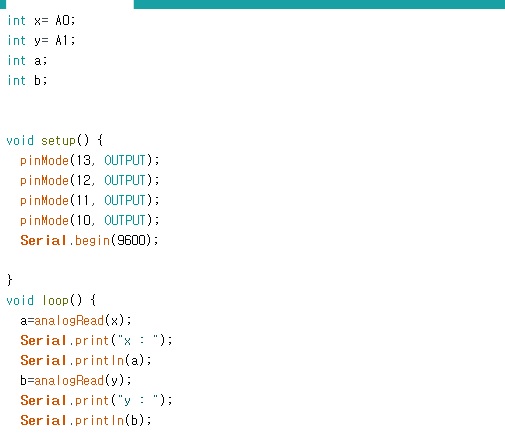
<Source>


if(Serial.available()){
a=Serial.read(); 처음에는 이 문장을 처음 시작할 때만 넣었습니다. 만약에 serial 값이 오면 a=는 그것을 읽어라인데 이걸 while문 끝날 때마다 넣어주지 않으면 무한 루프에 빠져서 Voltage 컨버팅 될 때마다 넣어 주었습니다.
DMM으로 회로 없이 측정하면 평균 값을 나타내기 때문에 위와 같이 확인할 수 있습니다.
이 부분이 RMS기능이라고 해야할지 RMS는 AC에서만 사용되는 것인지는 좀더 확인이 필요합니다.
정확한 파형을 확인하기 위해 스코프를 이용했습니다. C값이나 저항 값 LEDA TYPE으로 큰 것이 없어서 어느정도만 신호를 만들어 봤습니다. RC값을 더 커질수록 신호가 컨버팅 되는 시간이 더 길어집니다.
'LAP > Arduino' 카테고리의 다른 글
| [아두이노] CLCD에서 ADC(온도센서 값)읽기 (0) | 2019.09.27 |
|---|---|
| [아두이노] 16X2 CLCD LiquidCrystal 사용 (0) | 2019.09.27 |
| [아두이노] 2개 DC Motor 방향제어(조이스틱) (0) | 2019.09.25 |
| [아두이노] 온도센서 이용 모터,LED제어 (0) | 2019.09.25 |
| [아두이노] 초음파센서를 이용한 거리측정 (0) | 2019.09.20 |